C# 統計・微分積分・線形代数への道
「目次」
画像処理などで自前でアルゴリズムを書くにあたって、
数学と向き合わなくてはいけないシーンが多くなってきた。
プログラムをする上で必要な数学的知識をまとめたく感じた。
画像処理、機械学習、予測解析、構造設計などで必須となる「統計・微分積分・線形代数」。
「統計・微分積分・線形代数」を学ぶ為に必要な前知識や、
基礎となる周辺知識などを理解出来る範囲で学習していきまとめます。
頭カチカチの数学苦手のいい大人が基本から勉強していきたいと思います。
(免責:自己学習による個人の考えをまとめるので、恐らく認識間違えも沢山あります。
本当に正しい知識を求めるのであれば「チャート式」などの方が有益と思います)
C# 数学1 「三角関数-1、逆三角関数、三角比」
http://1studying.blogspot.jp/2017/08/c.html
・まとめ「三角関数」
三角関数系、基本12パターン(要「直角三角形」)
三角関数系、+1パターン。座標から角度を求める(要「直角三角形」)
・度数法とラジアン(角度単位)
度数法(ディグリー)
ラジアン(弧度法)
「度数法」←→「ラジアンπ」
ラジアンの詳細
「C#」や「計算機」で計算させる際の注意
・「三角関数」の元だね
「三角関数」(要「直角三角形」)
「sinθ、cosθ、tanθ」を「sinA、cosA、tanA」と書ける
「1/sinθ、1/cosθ、1/tanθ」を「cscθ、secθ、cotθ」と省略可
三角関数系、基本(6/12)パターン(要「直角三角形」)
計算例:(「三角関数」角度をラジアンで計算)
・「逆三角関数」の元だね
「逆三角関数」角度θを求める(要「直角三角形」)
「asin、acos、atan」を「sin-1、cos-1、tan-1」と書ける
三角関数系、基本(3/12)パターン(要「直角三角形」)
計算例:(「逆三角関数」角度をラジアンで計算)
・「比率(割合)と傾き」(「三角関数と逆三角関数」)
「三角関数」と「逆三角関数」の式まとめ
「比率(割合)と傾き」とは
「比率(割合)」とは…
「傾き」とは…
・三平方(ピタゴラス)の定理
「三平方(ピタゴラス)の定理」(要「直角三角形」)
三角関数系、基本(3/12)パターン(要「直角三角形」)
計算例:(ピタゴラスの定理)
「(三平方)ピタゴラスの定理」の応用(要「直角三角形」)
・「三角比」の前準備
「三角比」では角度の記述に「度数法(ディグリー)」を使う
「三角比」の為の前知識(重要)
三角比表「sinθ cosθ tanθ」値(「角度θ」を「比率や傾き」へ変換)の覚え方
「sinθ cosθ tanθ」表の覚え方2(分母の有理化済み)
・「三角比」
「三角関数」と「逆三角関数」と「比率と傾き」と「ピタゴラスの定理」まとめ
「対辺、底辺、斜辺」について
「三角比」の「角度θ」による見え方の変化と「単位円」
「三角比」ってなに?(要「直角三角形」)
三角比の例題1(sinA)
三角比の例題2(cosA)
「三角比」の公式1
「三角比」の公式2
「三角比」の公式3
「三角比」の公式の使用
・「三角関数」と「象限」
「三角関数」を使ってみる(象限)
「xy座標」と「象限」について
「三角比の拡張(三角関数)」の「解き方基本」
「第1象限」の「三角関数」
「第2象限」の「三角関数」
「三角関数」の表
「第3象限」の「三角関数」
「第4象限」の「三角関数」
「象限」の範囲と性質
「単位円」上での「三角関数」の定義と公式
・「逆三角関数」と「象限」
「三角関数」と「逆三角関数」の「角度θ」について
「主値」と「Asin()、Acos()、Atan()」について
「逆三角関数」を使ってみる(主値)
「第1象限」の「逆三角関数」
「第2象限」の「逆三角関数」
「第3象限」の「逆三角関数」
「第4象限」の「逆三角関数」
「0° 90° 180° 270° 360°」のときは?
傾きの特性「tanA、atan()」
「傾きの特性1」(主値)
「傾きの特性2」(「cosAやx」が「−マイナス値」場合は「+180°」)
「傾きの特性3」(「角度θ」による「tanA」の数値の変化)
・「三角比」の回転と反転
「三角比」の回転をする為の前知識
内角の和は常に「180°」
外角の定理
「三角比」の「回転、反転」とは…
「三角比」の「回転0°+」「回転360°+」
『sin(θ) cos(θ) tan(θ)』
「三角比」の回転の表現2種類「回転90°+」「回転180°+」
『sin(90°+θ) cos(90°+θ) tan(90°+θ)』
『sin(180°+θ) cos(180°+θ) tan(180°+θ)』
「三角比」の反転の表現3種類「反転0°−」「反転90°−」「反転180°−」
『sin(−θ) cos(−θ) tan(−θ)』
『sin(90°−θ) cos(90°−θ) tan(90°−θ)』
『sin(180°−θ) cos(180°−θ) tan(180°−θ)』
・凄く便利。「atan2」について
x値y値を元にθを取得する
三角関数系、+1パターン。座標から角度を求める(要「直角三角形」)
プログラム例
「関数電卓」の 「ベクトル計算」機能を使い角度を計算する場合
2点間座標から角度と直線距離を計算、角度と距離からxy座標を計算(プログラム例)
上を0°とした時計回りの角度での変換
・「atan2」を自作する
「atan2」が返す角度
「atan2」自作の為の準備
「myMakeAtan2」関数のプログラム
C# 数学2 「正弦定理、余弦定理」と証明
http://1studying.blogspot.jp/2017/08/c_92.html
・「△」「∠」「なす角」「外接円」について
文字辞書変換
三角形「△」
角「∠」
「なす角」
「外接円」
声に出す時は…
・「正弦定理」と「余弦定理」とは
「正弦定理」と「余弦定理」で求める
・「正弦定理」計算方法
「正弦定理」を使った計算の方法
・「余弦定理」計算方法
「余弦定理」を使った計算の方法
・「正弦定理」「余弦定理」の計算例
「鈍角」「直角」「鋭角」
正弦定理」「余弦定理」どちらを使うかの判断
「例題の準備」
「例題1」(角度を求める)
「例題2」(角度を求める)
「例題3」(sinAとcosAの相互変換)
例題3−1(sinθからcosθを求める)
例題3−2(cosθからsinθを求める)
例題3−3(「三角関数」の公式2の使用)
「例題4」(辺を求める)
「sin(105°)」を「加法定理」で求める
・「円周角の定理」(外角の定理)と「四角形の外接円」
「円周角」と「中心角」とは
「円周角の定理」
「円周角の定理」の証明(外角の定理)
「円周角の定理」の証明、その1
「円周角の定理」の証明、その2
「円周角の定理」の証明、その3
「円周角の定理」の証明、その4
「円周角の定理の逆」
「四角形の外接円」
・「正弦定理」の証明
三角形の角度の種類(鋭角、直角、鈍角)
「正弦定理」の覚え方
「正弦定理」を覚える
「辺」を求める形を覚える(正弦定理)
「角度」を求める形を覚える(正弦定理)
「鋭角(∠A<90°)」三角形の「正弦定理」の証明
「直角(∠A=90°)」三角形の「正弦定理」の証明
「鈍角(∠A>90°)」三角形の「正弦定理」の証明
・「余弦定理」の証明に必要な知識
「三角比の各辺の値の求め方」「180°−θ公式」
「(三平方)ピタゴラスの定理」
「三角関数」の公式2
・「第二余弦定理」の証明
三角形の角度の種類(鋭角、直角、鈍角)
「第二余弦定理」の覚え方
「第二余弦定理」を覚える
「角度」を求める形を覚える(余弦定理)
「鋭角(∠A<90°)」三角形の「第二余弦定理」の証明
「直角(∠A=90°)」三角形の「第二余弦定理」の証明
「鈍角(∠A>90°)」三角形の「余弦定理」の証明
・「第一余弦定理」の証明
証明の為の三角形の形2パターン
「第一余弦定理」のおさらい
「頂点が底辺の範囲内」のときの「第一余弦定理」の証明
「頂点が底辺の範囲外」のときの「第一余弦定理」の証明
・まとめ「正弦定理」「余弦定理」
「正弦定理」と「外接円の半径を求める形」
「正弦定理」の式変形(辺を求める形)
「正弦定理」の式変形(sin角度を求める形)
「第一余弦定理」(あまり使われません)
「第二余弦定理」(辺を求める)
「第二余弦定理」の式変形(cos角度を求める形)
C# 数学3 「統計-1、正規分布-1、偏差値」
http://1studying.blogspot.jp/2017/09/c_90.html
・和の記号Σ(シグマ)総和
Σとは…
計算例1
計算例2
Σの書き方
階和の公式
・Π(大文字のパイ)総乗、総積
Πとは…
計算例1
計算例2
Πの書き方
・Σ(シグマ)から「平均」と「平均偏差」の計算方法
Σで平均を計算する公式
「平均(average)」計算例
「偏差」って何?
Σで「平均偏差」を計算する公式
「平均偏差」計算例
補足(平均記号の書き方)
・「母平均(母集団の平均)μ(ミュー)」と「標本平均x−」
「母平均μ(母集団の平均)」とは
「標本平均」とは
「母平均μ(母集団の平均)」と「標本平均」
・「標準偏差σ(小文字のシグマ)、分散、正規分布」
「標準偏差σ」と「分散」とは何か…
「標準偏差σ」と「分散」の公式
「正規分布」とは…
計算例(「標準偏差σ」と「分散」と「正規分布」)
C# 数学4 「統計-2」
http://1studying.blogspot.jp/2017/11/c_28.html
・「偏差値」の計算
「偏差値」とは…
計算例:(偏差値)
・基準値、標準値(基準化、標準化)
「基準値(基準化)」「標準値(標準化)」
「標準値、標準化」とは
計算例:(標準値、標準化)
・「分散と不偏分散」「標準偏差と不偏標準偏差」
「母集団」と「標本」(推測統計とは)
「母平均μ」「標本平均x−」
「母分散σ2」と「標本分散s2」と「不偏分散u2」
「母分散σ2」
「標本分散s2」
「不偏分散u2」(標本不偏分散u2)
「分散V[X]」
「母標準偏差σ」と「標本標準偏差s」と「不偏標準偏差u」
「母標準偏差σ」
「標本標準偏差s」(標本偏差s)
「不偏標準偏差u」(不偏標本標準偏差u)
・「平均値(アベレージ)、中央値(メジアン)、最頻値(モード)」
「平均値(アベレージ)」「中央値(メジアン)」「最頻値(モード)」
「平均値(アベレージ)」
「中央値(メジアン)」
「最頻値(モード)」
分布図による「平均値、中央値、最頻値」のパターン
・「単項式 多項式 整式 分数式 有理式 無理式 係数 次数 元」
各「式」の区分図解
「単項式(項)」とは…(係数、項の次数次式)
「係数」「定数項」とは…
「項の次数、次式」とは…
「多項式」とは…(次式、元)
「次式」とは…
「元」とは…
「整式」とは…
「分数式」とは…
「有理式」とは…
「無理式」とは…
C# 数学6 「関数f(x)と関数yとx」
http://1studying.blogspot.jp/2017/11/c-fxffx.html
・「関数f(x)と関数yとx」
「関数f(x)」とは(f(x)はxの関数)
「関数y」とは(yはxの関数)
「関数f(x)」と「関数y」のグラフ
「関数、関数グラフ」の注意点(方程式のグラフ)
関数式である「f(x)=x2」「y=x2」
関数式ではない「f(x)=√xまたはー√x」「y=√xまたは−√x」
「方程式のグラフ、円の方程式のグラフ」(陰関数)
1次式2次式3次式とは(次数と次式と元)
「元」について…
「等式」と「不等式」と「恒等式」と「方程式」と「関数」の違い
「等式」とは
「不等式」とは
「恒等式」とは(「等式」の一部)
「方程式」とは(一次方程式 二次方程式 三次方程式)
「関数」とは(1次関数2次関数3次関数)
1次関数2次関数3次関数のグラフ
・ダミー
ダミー
ダミー
C# 数学8 「展開 因数分解-1 乗法公式 たすきがけ」
http://ダミー
・「乗法公式」パターンまとめ
「2乗公式」5パターン
「3乗公式」4パターン
「4乗公式」2パターン
「その他」5パターン
・「展開 因数分解 乗法公式」とは
「展開」とは
「因数分解」とは
「乗法公式」とは
・「展開」の仕方
「2乗公式」の「展開」手順(「(x+y)2」)
「3乗公式」の「展開」手順(「(x−y)3」)
「和と差の公式(x+y)(x−y)」の「展開」手順
「置き換え」を使用しての「展開」手順
・「約数 素数 因数 素因数 因数分解 素因数分解 共通因数」
「約数」とは
「素数」とは
「因数(因子)」とは
「素因数(素因子)」とは
「素因数分解」とは
「因数分解」とは
因数分解の仕方1「共通因数でくくる」
因数分解の仕方2「乗法公式を使う」
因数分解の仕方3「たすきがけ」
因数分解の仕方4「平方完成」「解の公式」「因数定理」
「共通因数(共通因子)」(共通項)とは
・因数分解の仕方1「共通因数でくくる」
「因数に分解」「共通因数」を探す「共通因数でくくり出す」
「因数に分解」
「共通因数」を探す
「共通因数でくくりだす」
「置き換え」を使用して「共通因数でくくる」(重要)
「因数分解」の例1(置き換えを使用)
「因数分解」の例2(置き換えを使用)
「共通因数」でくくれない?更に「因数分解」が出来そう?な場合…
・因数分解の仕方2「乗法公式を使う」
「乗法公式を使い因数分解」とは
「(2乗公式の基本式)」か「平方の公式(和)(差)」を使えないか考える
「(2乗公式の基本式)」での「因数分解」
「平方の公式(和)(差)」での「因数分解」
「和と差の積の公式」を使えないか考える
「和と差の積の公式」での「因数分解」
「たすきがけ」を使って「因数分解」が出来ないかを考える
・因数分解の仕方3「たすきがけ」
「たすきがけ因数分解」の公式(先にくくるチェック、互いに素)
「たすきがけ」は必ず「先にくくる」チェック
「互いに素」とは
「たすきがけ手順A」(基本)
「たすきがけ手順B」(応用)
・「たすきがけを素早くする方法」(たすきがけ手順補足)
「たすきがけ手順補足1」(計算を素早くする)
「たすきがけ手順補足2」(計算が素早くならない場合)
「たすきがけ手順補足1」の問題点
・「因数分解の使い所」
「二次方程式」を「因数分解」で解く1
「二次方程式」を「因数分解」で解く2
C# 数学09 「因数分解-2 平方完成 解の公式 解の吟味 D判定 因数定理」
ダミー
aa
C# 数学10 「二次方程式 方程式不等式 同値変形」
ダミー
aa
C# 数学11 「図形の証明(合同≡ 相似∽) 合同式≡mod余りの数」
http://1studying.blogspot.com/2018/09/c.html
・「図形の証明」の前知識
「定義」と「性質、定理」
「性質」と「定理」と「公式」
「仮定、前提」「結論」
「仮定、前提」
「結論」
「角」「頂点」「線分」「辺、長辺、短辺」「中線」
「角」
「頂点」
「線分」
「辺、長辺、短辺」
「角∠」「三角形△」「平行//」「直角⊥」「四角形□」
「AB」
「∠B」
「∠ABC」
「AB//CD」
「△ABC」
「AB⊥CD」
「□ABCDE」
「対角」「対角線」「対辺」
「対角」
「対角線」
「対辺」
「中点」「交点」「角の二等分線」「線分の二等分線」「垂直二等分線」「中線」
「辺の中点、線分の中点」
「交点、辺との交点」
「角の二等分線」
「線分の二等分線」
「垂直二等分線」
「中線」
「共通な角」「共通な辺」
「共通な角」
「共通な辺」
「対頂角」「錯角」「同位角」「AB//CDの錯角」「平行線の性質」
「対頂角は等しい」「平行線の錯角は等しい」「平行線の同位角は等しい」
「AB//CDの錯角」
「平行線の性質」
「三角形における内角と外角の性質(定理)」
「三角形の外角の定理(性質)」
「三角形の外角の定理(性質)」
「多角形の内角と外角」
「多角形の外角」の言い回し
「多角形の内角」の言い回し
「正方形」「長方形」「平行四辺形」「ひし形」の性質
「正方形の性質」
「長方形の性質」
「平行四辺形の性質」
「ひし形の性質」
「互いの関係」
「二等辺三角形」
「二等辺三角形」の名称(頂角 底辺 頂点 底角)
「二等辺三角形の性質」
「多角形の対角線の数」
「多角形の対角線の数」の公式
「円周角の定理」「円周角の定理の逆」「四角形の外接円の性質」
「円周角の定理」
「円周角の定理の逆」
「四角形の外接円の性質」
「合同≡」と「相似∽」の条件
「三角形の合同条件」
「三角形の相似条件」
2つの「三角形や四角形」に対する言い回し(「合同≡」と「相似∽」)
「対応する辺」という言い方
「対応する角」という言い方
「内分点」と「外分点」
・「図形の証明」
「図形の証明」の手順
「合同の証明」
「相似の証明」
「二等辺三角形の証明」
・三角形同士の性質(チェバの定理メネラウスの定理)
「三角形」同士の「相似比」の性質
「直角三角形」同士の「相似比」の性質
「直角三角形」の「各辺の名称」
「三角形」の「面積比」の性質
「内角の二等分線の定理」
「外角の二等分線の定理」
「チェバの定理」
「メネラウスの定理」
・「合同式≡」の前知識
「モジュロ(modulo)」とは
「法」とは(modとは)
「マイナス」の扱い(割り算やmodでのマイナス値)
「マイナス値の割り算」の商と余り
「マイナスの付いたmod」の計算
「合同式≡」と「等式=」
・「合同式≡」の演算方法
「合同式≡」(整数の合同)とは
「合同式同士」の「+−×乗算」
「合同式≡」同士の「足し算」
「合同式≡」同士の「引き算」
「合同式≡」同士の「掛け算1」
「合同式≡」同士の「掛け算2」
「合同式≡」同士の「乗算」
「合同式同士」の「+−×乗算」まとめ
「合同式≡」と「整数値」の「+−×」
「合同式≡」と「整数値」の「足し算」
「合同式≡」と「整数値」の「引き算」
「合同式≡」と「整数値」の「掛け算」
「法m」へ同時に「c」を掛ける事も可能
「合同式≡」と「−1」の「掛け算」
「合同式≡」の「+−×」まとめ
「合同式≡」の「割り算」
「合同式≡」の「割り算」が成立する理由(重要)
「左辺右辺の公約数」と「法」が「互いに素」でない「合同式≡」の「割り算」(重要)
「合同式≡」の「割り算」まとめ
「合同式≡」の「方程式」計算例
計算例1(「合同式≡」の「方程式」)
計算例2(「合同式≡」の「方程式」)
計算例3(「合同式≡」の「方程式」)
計算例4(「合同式≡」の「方程式」)(連立合同式、連立合同方程式)
計算例5(「合同式≡」の「方程式」)(代入)
・「合同式≡」の実用(余りの数の求め方)
「合同式≡」同士の演算と「合同式≡」の演算のルールまとめ
「合同式≡」同士の演算まとめ
「合同式≡」の演算まとめ
「合同式≡」で掛け算の余りを求める
通常の回答
合同式での回答
「合同式≡」で掛け算の余りを求める2
通常の回答
合同式での回答
「合同式≡」で「1の位の数」を求める
通常の回答(周期性、規則性、循環)
合同式での回答(周期性、規則性、循環)
「合同式≡」で乗数の余りを求める
通常の回答(周期性、規則性、循環)
合同式での回答(周期性、規則性、循環)
C# 数学12 「集合 集合記号 論理記号 命題」
http://
・「集合」(自然数N整数Z有理数Q実数R複素数C 無理数R-Q)と「要素」
「集合」と「要素」…
「集合」の「濃度」は要素の数
「集合」を表す文字(自然数N整数Z有理数Q実数R複素数C 無理数R-Q)…
・集合記号「∈∉⊂⊆⊊、∩∪Φ(大文字のファイ)A−」
集合「状態」を示す物基本4パターン(∈∉⊂⊆⊊)
属する∈
属さない∉(not)
部分集合⊆
真部分集合⊊
集合「エリア(範囲)」を示す基本5パターン(∩∪UΦAA−)
積集合、共通集合∩(and)
和集合、合併集合∪(or)
全体集合U
空集合Φ
補集合A−(not)
ドモルガンの法則…
「集合」を「n(集合式)」や「|集合式|」で記述
「和集合」の式(2つの集合、3つの集合)
2つの集合の「和集合」の式
3つの集合の「和集合」の式
・「集合」の「条件式、濃度、直積集合」記述
条件式付き集合の記述…
記述例1:
記述例2:
記述例3:
「P」と「P(x)」などの「条件式付き集合」の記述方法(重要)
「集合」の「要素数」と「濃度」
「全単射」
「全射、単射」
「写像map(集合A,集合B)」(配置集合)
「無限集合」同士の全単射
「直積集合」について(直積、デカルト積)
・「論理記号」(∧&∨¬⇒→⊕⊻≠⇔⇄↔≡=)
「真理値表」の「真1」と「偽0」の表記について
「∧」「&」…「論理積and」「かつ」「および」
「∨」…「論理和or」「または」「もしくは」
「¬」「!」…「否定not」「〜でない」
「⇒」「→」…「論理包含imp」「含意imp」(条件式)「証明▶〜ならば〜である」
「≠」「⊻」「⊕」…「排他的論理和xor」「証明▶≠等しくない」
「⇔」「⇄」(↔≡=)…「同値xnor」(「iff」と書く事もある)「証明▶互いに成り立つ」
「論理記号」使用例
「P ∧ Q」論理積and
「P ∨ Q」論理和or
「¬P」否定not
「P ⇒ Q」論理包含imp
「P ⊕ Q」排他的論理和xor
「P ⇔ Q」同値xnor
・「集合」と「論理演算」の関係
「and」(PかつQである)
「or」(PまたはQである)
「not」(Pでない)
「論理包含⇒」(PならばQである)
・「命題」と「否定」 (論理演算)
「論理演算(bool演算)」「論理変数(命題変数、bool変数)」について
「論理演算(bool演算)」は「真偽」を返す
「論理変数(命題変数、bool変数)」は「真偽」を表現する
大文字と小文字の違い「Pとp」「Qとq」
「命題」「真の命題」「偽の命題」とは
「真の命題」
「偽の命題」
「命題でない」
「真の命題」「偽の命題」は「命題」と省略して書く
「否定¬」について
「命題p」の「否定」について
「p and q」「p or q」の「否定」(ドモルガンの法則)
「命題」の「否定」でよく使われる形
・「条件、条件命題」「命題関数 述語 性質」
「条件、条件命題」と「命題関数」とは(「事柄(内容)」と「変数x」)
「命題関数」とは(変数x)
「条件、条件命題」とは「命題関数」の事である
「条件命題」を「条件」と省略して書く
「条件」とは「命題関数 述語 性質」の事である
・「命題」と「条件、条件命題」と「集合」
「命題と条件命題」の考え方
「変数を持たない」時(「命題p」など)(0項述語)
「変数を1つ」持つ時(「条件p」や「条件p(x)」など)(1項述語)
「変数を2つ」持つ時(「条件p(x, y)」など)(2項述語)
「条件命題p(x)」と「集合P(x)」の区別
「真理集合」とは…(「条件P(x)」と「集合」の記述)
「命題」「条件」「集合」の表記の曖昧さについて
・「単純命題(要素命題)」と「複合命題(合成命題)」
「論理記号」と「命題」で使う「品詞(助動詞 係助詞 接続詞 否定詞)」
「単純命題(要素命題)」とは(「論理演算」を含まない「命題」)
「複合命題(合成命題)」とは(「論理演算」を含む「命題」)
・「推論の命題⇒」の概要
「推論の命題⇒」(〜ならば〜である)
「ならば」や「p ⇒ q」とは「p or !q」や「!(p&!q)」のことである(重要)
「ならば」について…(重要)
「p ⇒ q」が「真」の時、「P ⊆ Q」となる(重要)
「P ⇒ Q」が「真」の時、何故「P ⊆ Q」と言えるのかの証明
「十分条件、必要条件、必要十分条件」(十分範囲、必要範囲)
「十分条件」と「必要条件」の「覚え方」
「必要十分条件」
「十分条件、必要条件」の使用例
・「推論の命題⇒」の考察
何故「P⇒Q」は理解しづらいのか?
疑問1(「P ⇒ Q」のPが偽の時に真となるのが腑に落ちない)
疑問2(「P ⇒ Q」を「P ⊃ Q」と記述するのが腑に落ちない)
疑問を解決する為の前知識1(空集合の定理1、元ゲン)
「P ⇒ Q」と「¬(P ⇒ Q)」
「空集合Φのルール1」
「空集合Φのルール1−1」
「空集合Φのルール1−2」
「元ゲン」とは
疑問を解決する為の前知識2(空集合の定理2、べき集合)
「空集合Φのルール2」
「空集合Φのルール2」の補足
「集合」と「{}」
「べき集合(冪集合)、集合族」(「べき集合」と「部分集合⊆」の違い)
「空集合Φ」と「べき集合」の濃度
「空集合Φのルール2−1」
「空集合Φのルール2−2」
疑問1の考察(「P ⇒ Q」のPが偽の時に真となるのが腑に落ちない)
「Pが真1」「Qが真1」「P ⇒ Qが真1」の考察
「Pが真1」「Qが偽0」「P ⇒ Qが偽0」の考察
「Pが偽0」「Qが真1」「P ⇒ Qが真1」の考察
「Pが偽0」「Qが偽0」「P ⇒ Qが真1」の考察
疑問2の考察(「P ⇒ Q」を「P ⊃ Q」と記述するのが腑に落ちない)
・「推論の命題⇒」の「逆 裏 対偶」
「推論の命題⇒」の「逆 裏 対偶」
「命題の逆裏対偶」と「論理演算と集合」の関係
「①命題P ⇒ Q」と「④対偶¬Q ⇒ ¬P」の関係(!P or Q)
「②逆Q ⇒ P」と「③裏¬P ⇒ ¬Q」の関係(P or !Q)
・「推論の命題⇒」の「証明」(反例と背理法)
制作中です
・集合の「写像f」と「関数f(x)」
「写像f」とは…
使用例:
「写像」の条件
「部分写像」「始域と終域」「定義域と値域」「全単射」
「写像f」は関数「f(x)」と同じ…
計算例1:
計算例2:
計算例補足:(この手の計算時の決まり事3つの心得)
「逆写像f-1」(fインバース)について
作成中
作成中
作成中
C# 数学16 「極限-基本1」
http://1studying.blogspot.jp/2017/10/c.html
・「極限lim」(リミット)
「極限lim」とは…(収束と発散)
「収束」の詳細…
「発散」の詳細…
「振動」とは…
「不定形の極限」(不定形とは…)
「不定形の極限」例(不定形4パターンと不定形でないパターン)
「不定形の極限」の際の注意
「片側極限」「左極限(左側極限)」「右極限(右側極限)」
絶対値の極限(片側極限)
・底、真数、指数、対数
真数と対数とは
・「対数log」、常用対数について
関数電卓で「対数log」を計算
「常用対数」について…(log10)
関数電卓の記述で統一
・「対数log」の公式
「対数log」の公式4パターン
定義
「logの性質」となる公式
「log真数の積」から「対数logの和」への公式
「log真数の商」から「対数logの差」への公式
「log真数の累乗」から「実数と対数logの積」への公式
「底の変換公式」
「底の変換公式」計算例
常用対数表と自然体数表
・「ネイピア数e(exp)」、自然対数について
「ネイピア数e(exp)」
「ネイピア数e」の別の記述方法
「自然対数」について…(loge又はlnログナチュラル)
・常用対数と自然対数の定義
常用対数の定義
自然対数の定義
・C#で常用対数(log10)や自然対数(logeやln)を扱う
C#での対数使用例
C#と関数電卓でのlogの違い
・PCや関数電卓で「指数表記e」を扱う際の注意
「E」や「e」を「指数表記」として扱う!?
C# 数学20 「統計-基本3」
ダミー
・「統計的予測」をする
「統計分析」と「統計的予測」…
「統計的予測」と「推測統計」の違い
・「離散型」の「確率分布、確率変数X、関数P」について
「離散型確率分布」「確率変数X」「確率質量関数P」
「離散型確率分布」と「二項分布」
「離散型と連続型」の「確率変数Xと確率分布」(確率質量関数Pと確率密度関数P)
・確率と期待値E[X]と分散V[X]
「確率」とは
「期待値」とは(「期待値」と「平均」の違い)
「期待値E[X]」と「分散V[X]」(離散型確率変数Xに対して)
「期待値」の計算例
計算例:(期待値Eと正規分布)
・「プロスペクト理論」と「モンティ・ホール問題」と「ガチャ」
「プロスペクト理論」
「モンティ・ホール問題」
作成中
・「順列P」と「組合せC」の公式
「順列P」と「組合せC」の違い
「順列Pの公式」と「組合せCの公式」
・「重複順列」と「重複組合せH」の公式
「重複順列」(全パターン数)と「重複順列の公式」
計算例1:(重複順列)
計算例2:(重複順列)
「重複組合せH」と「重複組合せHの公式」
計算例1:(重複組合せH)
計算例2:(重複組合せH)
計算例3:(重複組合せH)
・「順列P、組合せC、重複順列、重複組合せH」まとめ
「順列P、組合せC、重複順列、重複組合せH」の違いとまとめ
「重複順列」(全パターン数)
「順列P」
「組合せC」
「重複組合せH」
「順列P」公式の変形
「順列P」と「組合せC」の相互変換公式
「二項定理」「二項分布」への準備
計算例:(組合せC補足)
・「項、二項、多項、一般項」
「項」と「二項」と「多項」について
「一般項」とは
・二項定理
作成中
C# 数学99 「統計-基本4」
ダミー
作成中
・「ネイピア数e」を求める
「ネイピア数e」の数値を計算
「極限lim」で「ネイピア数e」を求める
「総和Σ」で「ネイピア数e」を求める
・「極限lim」で「ネイピア数e」を求める(複利計算)
「複利計算」とは
計算例1(複利計算):
計算例2(複利計算):
「複利計算」から「ネイピア数e」を求める
・「極限lim」で「ネイピア数eの逆数」を求める(外れる確率)
「極限lim」で「ネイピア数eの逆数」を求める
当たるか外れるか「確率」「期待値」とは(分散Vと標準偏差σ)
作成中
・「はさみうちの原理(定理)」
「はさみうちの原理」とは
計算例1(はさみうちの原理):
計算例2(はさみうちの原理):
「はさみうちの原理」と「はさみうちの定理」の違い
・「マクローリン展開」で「極限lim」を求める
「マクローリン展開」とは
計算例1:(マクローリン展開)
計算例2:(マクローリン展開)
「マクローリン展開」で「極限lim」を求める
計算例1:(マクローリン展開で極限lim)
計算例2:(マクローリン展開で極限lim)
・「ロピタルの定理」で「極限lim」を求める
「ロピタルの定理」とは
作成中
・まとめ「行列その1」「ベクトル」
「行列」の計算
「ベクトル」の計算
・「行列」の書き方
行列の見方
(行,列)の見方
「複数の行列」と「添え字」
・行列って何?
説明1:「写像」で「行列」をイメージ
説明2:「メソッド」で「行列」をイメージ
・「行列の和」「行列の差」の計算方法
行列の和
行列の差
・「行列のスカラー倍」の計算方法
行列のスカラー倍(スカラー乗積)
(「λラムダ」って何?…)
・「行列の積」の計算方法
行列の積
・「行列とベクトルの積」の計算方法
行列とベクトルの積
・「ベクトル」の書き方
ベクトルの書き方(転置ベクトルとは…)
ベクトルの記述とイメージ
ベクトル記号の書き方1(「a→」ベクトル)
ベクトル記号の書き方2(「|・|」絶対値absと「||・||」ノルム)
ベクトルの計算(ノムル)
・「ベクトルとベクトルの和」の計算方法
ベクトルとベクトルの和
・「ベクトルの内積」(スカラー積)の計算方法
ベクトルの内積(スカラー積)
「ドット積(標準内積)」と「ベクトルの内積」の関係
「ベクトルの内積」(スカラー積)とは…
・「ベクトルの外積」(ベクトル積)の計算方法
ベクトルの外積(ベクトル積)
「面積(a→b→)」と「ベクトルの外積」の関係
「ベクトルの外積」(ベクトル積)とは…
その他の外積(外積代数)
ベクトルの内積、ベクトルの外積の記述
・他の行列
「目次」
画像処理などで自前でアルゴリズムを書くにあたって、
数学と向き合わなくてはいけないシーンが多くなってきた。
プログラムをする上で必要な数学的知識をまとめたく感じた。
画像処理、機械学習、予測解析、構造設計などで必須となる「統計・微分積分・線形代数」。
「統計・微分積分・線形代数」を学ぶ為に必要な前知識や、
基礎となる周辺知識などを理解出来る範囲で学習していきまとめます。
頭カチカチの数学苦手のいい大人が基本から勉強していきたいと思います。
(免責:自己学習による個人の考えをまとめるので、恐らく認識間違えも沢山あります。
本当に正しい知識を求めるのであれば「チャート式」などの方が有益と思います)
C# 数学1 「三角関数-1、逆三角関数、三角比」
(ラジアン sin cos tan asin acos atan atan2)
http://1studying.blogspot.jp/2017/08/c.html・まとめ「三角関数」
三角関数系、基本12パターン(要「直角三角形」)
三角関数系、+1パターン。座標から角度を求める(要「直角三角形」)
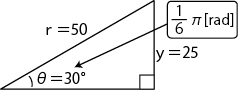
・度数法とラジアン(角度単位)
度数法(ディグリー)
ラジアン(弧度法)
「度数法」←→「ラジアンπ」
ラジアンの詳細
「C#」や「計算機」で計算させる際の注意
・「三角関数」の元だね
「三角関数」(要「直角三角形」)
「sinθ、cosθ、tanθ」を「sinA、cosA、tanA」と書ける
「1/sinθ、1/cosθ、1/tanθ」を「cscθ、secθ、cotθ」と省略可
三角関数系、基本(6/12)パターン(要「直角三角形」)
計算例:(「三角関数」角度をラジアンで計算)
・「逆三角関数」の元だね
「逆三角関数」角度θを求める(要「直角三角形」)
「asin、acos、atan」を「sin-1、cos-1、tan-1」と書ける
三角関数系、基本(3/12)パターン(要「直角三角形」)
計算例:(「逆三角関数」角度をラジアンで計算)
・「比率(割合)と傾き」(「三角関数と逆三角関数」)
「三角関数」と「逆三角関数」の式まとめ
「比率(割合)と傾き」とは
「比率(割合)」とは…
「傾き」とは…
・三平方(ピタゴラス)の定理
「三平方(ピタゴラス)の定理」(要「直角三角形」)
三角関数系、基本(3/12)パターン(要「直角三角形」)
計算例:(ピタゴラスの定理)
「(三平方)ピタゴラスの定理」の応用(要「直角三角形」)
・「三角比」の前準備
「三角比」では角度の記述に「度数法(ディグリー)」を使う
「三角比」の為の前知識(重要)
三角比表「sinθ cosθ tanθ」値(「角度θ」を「比率や傾き」へ変換)の覚え方
「sinθ cosθ tanθ」表の覚え方2(分母の有理化済み)
・「三角比」
「三角関数」と「逆三角関数」と「比率と傾き」と「ピタゴラスの定理」まとめ
「対辺、底辺、斜辺」について
「三角比」の「角度θ」による見え方の変化と「単位円」
「三角比」ってなに?(要「直角三角形」)
三角比の例題1(sinA)
三角比の例題2(cosA)
「三角比」の公式1
「三角比」の公式2
「三角比」の公式3
「三角比」の公式の使用
・「三角関数」と「象限」
「三角関数」を使ってみる(象限)
「xy座標」と「象限」について
「三角比の拡張(三角関数)」の「解き方基本」
「第1象限」の「三角関数」
「第2象限」の「三角関数」
「三角関数」の表
「第3象限」の「三角関数」
「第4象限」の「三角関数」
「象限」の範囲と性質
「単位円」上での「三角関数」の定義と公式
・「逆三角関数」と「象限」
「三角関数」と「逆三角関数」の「角度θ」について
「主値」と「Asin()、Acos()、Atan()」について
「逆三角関数」を使ってみる(主値)
「第1象限」の「逆三角関数」
「第2象限」の「逆三角関数」
「第3象限」の「逆三角関数」
「第4象限」の「逆三角関数」
「0° 90° 180° 270° 360°」のときは?
傾きの特性「tanA、atan()」
「傾きの特性1」(主値)
「傾きの特性2」(「cosAやx」が「−マイナス値」場合は「+180°」)
「傾きの特性3」(「角度θ」による「tanA」の数値の変化)
・「三角比」の回転と反転
「三角比」の回転をする為の前知識
内角の和は常に「180°」
外角の定理
「三角比」の「回転、反転」とは…
「三角比」の「回転0°+」「回転360°+」
『sin(θ) cos(θ) tan(θ)』
「三角比」の回転の表現2種類「回転90°+」「回転180°+」
『sin(90°+θ) cos(90°+θ) tan(90°+θ)』
『sin(180°+θ) cos(180°+θ) tan(180°+θ)』
「三角比」の反転の表現3種類「反転0°−」「反転90°−」「反転180°−」
『sin(−θ) cos(−θ) tan(−θ)』
『sin(90°−θ) cos(90°−θ) tan(90°−θ)』
『sin(180°−θ) cos(180°−θ) tan(180°−θ)』
・凄く便利。「atan2」について
x値y値を元にθを取得する
三角関数系、+1パターン。座標から角度を求める(要「直角三角形」)
プログラム例
「関数電卓」の 「ベクトル計算」機能を使い角度を計算する場合
2点間座標から角度と直線距離を計算、角度と距離からxy座標を計算(プログラム例)
上を0°とした時計回りの角度での変換
・「atan2」を自作する
「atan2」が返す角度
「atan2」自作の為の準備
「myMakeAtan2」関数のプログラム
C# 数学2 「正弦定理、余弦定理」と証明
(円周角の定理と外角の定理と四角形の外接円)
http://1studying.blogspot.jp/2017/08/c_92.html・「△」「∠」「なす角」「外接円」について
文字辞書変換
三角形「△」
角「∠」
「なす角」
「外接円」
声に出す時は…
・「正弦定理」と「余弦定理」とは
「正弦定理」と「余弦定理」で求める
・「正弦定理」計算方法
「正弦定理」を使った計算の方法
・「余弦定理」計算方法
「余弦定理」を使った計算の方法
・「正弦定理」「余弦定理」の計算例
「鈍角」「直角」「鋭角」
正弦定理」「余弦定理」どちらを使うかの判断
「例題の準備」
「例題1」(角度を求める)
「例題2」(角度を求める)
「例題3」(sinAとcosAの相互変換)
例題3−1(sinθからcosθを求める)
例題3−2(cosθからsinθを求める)
例題3−3(「三角関数」の公式2の使用)
「例題4」(辺を求める)
「sin(105°)」を「加法定理」で求める
・「円周角の定理」(外角の定理)と「四角形の外接円」
「円周角」と「中心角」とは
「円周角の定理」
「円周角の定理」の証明(外角の定理)
「円周角の定理」の証明、その1
「円周角の定理」の証明、その2
「円周角の定理」の証明、その3
「円周角の定理」の証明、その4
「円周角の定理の逆」
「四角形の外接円」
・「正弦定理」の証明
三角形の角度の種類(鋭角、直角、鈍角)
「正弦定理」の覚え方
「正弦定理」を覚える
「辺」を求める形を覚える(正弦定理)
「角度」を求める形を覚える(正弦定理)
「鋭角(∠A<90°)」三角形の「正弦定理」の証明
「直角(∠A=90°)」三角形の「正弦定理」の証明
「鈍角(∠A>90°)」三角形の「正弦定理」の証明
・「余弦定理」の証明に必要な知識
「三角比の各辺の値の求め方」「180°−θ公式」
「(三平方)ピタゴラスの定理」
「三角関数」の公式2
・「第二余弦定理」の証明
三角形の角度の種類(鋭角、直角、鈍角)
「第二余弦定理」の覚え方
「第二余弦定理」を覚える
「角度」を求める形を覚える(余弦定理)
「鋭角(∠A<90°)」三角形の「第二余弦定理」の証明
「直角(∠A=90°)」三角形の「第二余弦定理」の証明
「鈍角(∠A>90°)」三角形の「余弦定理」の証明
・「第一余弦定理」の証明
証明の為の三角形の形2パターン
「第一余弦定理」のおさらい
「頂点が底辺の範囲内」のときの「第一余弦定理」の証明
「頂点が底辺の範囲外」のときの「第一余弦定理」の証明
・まとめ「正弦定理」「余弦定理」
「正弦定理」と「外接円の半径を求める形」
「正弦定理」の式変形(辺を求める形)
「正弦定理」の式変形(sin角度を求める形)
「第一余弦定理」(あまり使われません)
「第二余弦定理」(辺を求める)
「第二余弦定理」の式変形(cos角度を求める形)
C# 数学3 「統計-1、正規分布-1、偏差値」
(総和Σ 総乗Π 平均偏差 母平均μ 標本平均 標準偏差σ 分散)
http://1studying.blogspot.jp/2017/09/c_90.html・和の記号Σ(シグマ)総和
Σとは…
計算例1
計算例2
Σの書き方
階和の公式
・Π(大文字のパイ)総乗、総積
Πとは…
計算例1
計算例2
Πの書き方
・Σ(シグマ)から「平均」と「平均偏差」の計算方法
Σで平均を計算する公式
「平均(average)」計算例
「偏差」って何?
Σで「平均偏差」を計算する公式
「平均偏差」計算例
補足(平均記号の書き方)
・「母平均(母集団の平均)μ(ミュー)」と「標本平均x−」
「母平均μ(母集団の平均)」とは
「標本平均」とは
「母平均μ(母集団の平均)」と「標本平均」
・「標準偏差σ(小文字のシグマ)、分散、正規分布」
「標準偏差σ」と「分散」とは何か…
「標準偏差σ」と「分散」の公式
「正規分布」とは…
計算例(「標準偏差σ」と「分散」と「正規分布」)
C# 数学4 「統計-2」
「偏差値、標準化、分散と不偏分散、標準偏差と不偏標準偏差、平均値中央値最頻値」
http://1studying.blogspot.jp/2017/11/c_28.html・「偏差値」の計算
「偏差値」とは…
計算例:(偏差値)
・基準値、標準値(基準化、標準化)
「基準値(基準化)」「標準値(標準化)」
「標準値、標準化」とは
計算例:(標準値、標準化)
・「分散と不偏分散」「標準偏差と不偏標準偏差」
「母集団」と「標本」(推測統計とは)
「母平均μ」「標本平均x−」
「母分散σ2」と「標本分散s2」と「不偏分散u2」
「母分散σ2」
「標本分散s2」
「不偏分散u2」(標本不偏分散u2)
「分散V[X]」
「母標準偏差σ」と「標本標準偏差s」と「不偏標準偏差u」
「母標準偏差σ」
「標本標準偏差s」(標本偏差s)
「不偏標準偏差u」(不偏標本標準偏差u)
・「平均値(アベレージ)、中央値(メジアン)、最頻値(モード)」
「平均値(アベレージ)」「中央値(メジアン)」「最頻値(モード)」
「平均値(アベレージ)」
「中央値(メジアン)」
「最頻値(モード)」
分布図による「平均値、中央値、最頻値」のパターン
C# 数学5 「単項式 多項式 整式 分数式 有理式 無理式 係数 項の次数次式元」
http://1studying.blogspot.jp/2018/05/c.html・「単項式 多項式 整式 分数式 有理式 無理式 係数 次数 元」
各「式」の区分図解
「単項式(項)」とは…(係数、項の次数次式)
「係数」「定数項」とは…
「項の次数、次式」とは…
「多項式」とは…(次式、元)
「次式」とは…
「元」とは…
「整式」とは…
「分数式」とは…
「有理式」とは…
「無理式」とは…
C# 数学6 「関数f(x)と関数yとx」
(等式 不等式 恒等式 方程式 関数 次数次式 元)
http://1studying.blogspot.jp/2017/11/c-fxffx.html・「関数f(x)と関数yとx」
「関数f(x)」とは(f(x)はxの関数)
「関数y」とは(yはxの関数)
「関数f(x)」と「関数y」のグラフ
「関数、関数グラフ」の注意点(方程式のグラフ)
関数式である「f(x)=x2」「y=x2」
関数式ではない「f(x)=√xまたはー√x」「y=√xまたは−√x」
「方程式のグラフ、円の方程式のグラフ」(陰関数)
1次式2次式3次式とは(次数と次式と元)
「元」について…
「等式」と「不等式」と「恒等式」と「方程式」と「関数」の違い
「等式」とは
「不等式」とは
「恒等式」とは(「等式」の一部)
「方程式」とは(一次方程式 二次方程式 三次方程式)
「関数」とは(1次関数2次関数3次関数)
1次関数2次関数3次関数のグラフ
C# 数学7 「ルート√、二乗(乗算)、絶対値abs、虚数iと複素数、倍数」の基礎
httpダミー・ダミー
ダミー
ダミー
C# 数学8 「展開 因数分解-1 乗法公式 たすきがけ」
(約数 素数 因数 素因数 因数分解 素因数分解 共通因数)
http://ダミー・「乗法公式」パターンまとめ
「2乗公式」5パターン
「3乗公式」4パターン
「4乗公式」2パターン
「その他」5パターン
・「展開 因数分解 乗法公式」とは
「展開」とは
「因数分解」とは
「乗法公式」とは
・「展開」の仕方
「2乗公式」の「展開」手順(「(x+y)2」)
「3乗公式」の「展開」手順(「(x−y)3」)
「和と差の公式(x+y)(x−y)」の「展開」手順
「置き換え」を使用しての「展開」手順
・「約数 素数 因数 素因数 因数分解 素因数分解 共通因数」
「約数」とは
「素数」とは
「因数(因子)」とは
「素因数(素因子)」とは
「素因数分解」とは
「因数分解」とは
因数分解の仕方1「共通因数でくくる」
因数分解の仕方2「乗法公式を使う」
因数分解の仕方3「たすきがけ」
因数分解の仕方4「平方完成」「解の公式」「因数定理」
「共通因数(共通因子)」(共通項)とは
・因数分解の仕方1「共通因数でくくる」
「因数に分解」「共通因数」を探す「共通因数でくくり出す」
「因数に分解」
「共通因数」を探す
「共通因数でくくりだす」
「置き換え」を使用して「共通因数でくくる」(重要)
「因数分解」の例1(置き換えを使用)
「因数分解」の例2(置き換えを使用)
「共通因数」でくくれない?更に「因数分解」が出来そう?な場合…
・因数分解の仕方2「乗法公式を使う」
「乗法公式を使い因数分解」とは
「(2乗公式の基本式)」か「平方の公式(和)(差)」を使えないか考える
「(2乗公式の基本式)」での「因数分解」
「平方の公式(和)(差)」での「因数分解」
「和と差の積の公式」を使えないか考える
「和と差の積の公式」での「因数分解」
「たすきがけ」を使って「因数分解」が出来ないかを考える
・因数分解の仕方3「たすきがけ」
「たすきがけ因数分解」の公式(先にくくるチェック、互いに素)
「たすきがけ」は必ず「先にくくる」チェック
「互いに素」とは
「たすきがけ手順A」(基本)
「たすきがけ手順B」(応用)
・「たすきがけを素早くする方法」(たすきがけ手順補足)
「たすきがけ手順補足1」(計算を素早くする)
「たすきがけ手順補足2」(計算が素早くならない場合)
「たすきがけ手順補足1」の問題点
・「因数分解の使い所」
「二次方程式」を「因数分解」で解く1
「二次方程式」を「因数分解」で解く2
C# 数学09 「因数分解-2 平方完成 解の公式 解の吟味 D判定 因数定理」
()
ダミーaa
C# 数学10 「二次方程式 方程式不等式 同値変形」
()
ダミーaa
C# 数学11 「図形の証明(合同≡ 相似∽) 合同式≡mod余りの数」
(チェバの定理メネラウスの定理)
http://1studying.blogspot.com/2018/09/c.html・「図形の証明」の前知識
「定義」と「性質、定理」
「性質」と「定理」と「公式」
「仮定、前提」「結論」
「仮定、前提」
「結論」
「角」「頂点」「線分」「辺、長辺、短辺」「中線」
「角」
「頂点」
「線分」
「辺、長辺、短辺」
「角∠」「三角形△」「平行//」「直角⊥」「四角形□」
「AB」
「∠B」
「∠ABC」
「AB//CD」
「△ABC」
「AB⊥CD」
「□ABCDE」
「対角」「対角線」「対辺」
「対角」
「対角線」
「対辺」
「中点」「交点」「角の二等分線」「線分の二等分線」「垂直二等分線」「中線」
「辺の中点、線分の中点」
「交点、辺との交点」
「角の二等分線」
「線分の二等分線」
「垂直二等分線」
「中線」
「共通な角」「共通な辺」
「共通な角」
「共通な辺」
「対頂角」「錯角」「同位角」「AB//CDの錯角」「平行線の性質」
「対頂角は等しい」「平行線の錯角は等しい」「平行線の同位角は等しい」
「AB//CDの錯角」
「平行線の性質」
「三角形における内角と外角の性質(定理)」
「三角形の外角の定理(性質)」
「三角形の外角の定理(性質)」
「多角形の内角と外角」
「多角形の外角」の言い回し
「多角形の内角」の言い回し
「正方形」「長方形」「平行四辺形」「ひし形」の性質
「正方形の性質」
「長方形の性質」
「平行四辺形の性質」
「ひし形の性質」
「互いの関係」
「二等辺三角形」
「二等辺三角形」の名称(頂角 底辺 頂点 底角)
「二等辺三角形の性質」
「多角形の対角線の数」
「多角形の対角線の数」の公式
「円周角の定理」「円周角の定理の逆」「四角形の外接円の性質」
「円周角の定理」
「円周角の定理の逆」
「四角形の外接円の性質」
「合同≡」と「相似∽」の条件
「三角形の合同条件」
「三角形の相似条件」
2つの「三角形や四角形」に対する言い回し(「合同≡」と「相似∽」)
「対応する辺」という言い方
「対応する角」という言い方
「内分点」と「外分点」
・「図形の証明」
「図形の証明」の手順
「合同の証明」
「相似の証明」
「二等辺三角形の証明」
・三角形同士の性質(チェバの定理メネラウスの定理)
「三角形」同士の「相似比」の性質
「直角三角形」同士の「相似比」の性質
「直角三角形」の「各辺の名称」
「三角形」の「面積比」の性質
「内角の二等分線の定理」
「外角の二等分線の定理」
「チェバの定理」
「メネラウスの定理」
・「合同式≡」の前知識
「モジュロ(modulo)」とは
「法」とは(modとは)
「マイナス」の扱い(割り算やmodでのマイナス値)
「マイナス値の割り算」の商と余り
「マイナスの付いたmod」の計算
「合同式≡」と「等式=」
・「合同式≡」の演算方法
「合同式≡」(整数の合同)とは
「合同式同士」の「+−×乗算」
「合同式≡」同士の「足し算」
「合同式≡」同士の「引き算」
「合同式≡」同士の「掛け算1」
「合同式≡」同士の「掛け算2」
「合同式≡」同士の「乗算」
「合同式同士」の「+−×乗算」まとめ
「合同式≡」と「整数値」の「+−×」
「合同式≡」と「整数値」の「足し算」
「合同式≡」と「整数値」の「引き算」
「合同式≡」と「整数値」の「掛け算」
「法m」へ同時に「c」を掛ける事も可能
「合同式≡」と「−1」の「掛け算」
「合同式≡」の「+−×」まとめ
「合同式≡」の「割り算」
「合同式≡」の「割り算」が成立する理由(重要)
「左辺右辺の公約数」と「法」が「互いに素」でない「合同式≡」の「割り算」(重要)
「合同式≡」の「割り算」まとめ
「合同式≡」の「方程式」計算例
計算例1(「合同式≡」の「方程式」)
計算例2(「合同式≡」の「方程式」)
計算例3(「合同式≡」の「方程式」)
計算例4(「合同式≡」の「方程式」)(連立合同式、連立合同方程式)
計算例5(「合同式≡」の「方程式」)(代入)
・「合同式≡」の実用(余りの数の求め方)
「合同式≡」同士の演算と「合同式≡」の演算のルールまとめ
「合同式≡」同士の演算まとめ
「合同式≡」の演算まとめ
「合同式≡」で掛け算の余りを求める
通常の回答
合同式での回答
「合同式≡」で掛け算の余りを求める2
通常の回答
合同式での回答
「合同式≡」で「1の位の数」を求める
通常の回答(周期性、規則性、循環)
合同式での回答(周期性、規則性、循環)
「合同式≡」で乗数の余りを求める
通常の回答(周期性、規則性、循環)
合同式での回答(周期性、規則性、循環)
C# 数学12 「集合 集合記号 論理記号 命題」
(NZQRC ∈∉⊂⊆⊊∩∪ΦA− ∧&∨¬⇒→⊕⊻≠⇔⇄↔≡=)
http://・「集合」(自然数N整数Z有理数Q実数R複素数C 無理数R-Q)と「要素」
「集合」と「要素」…
「集合」の「濃度」は要素の数
「集合」を表す文字(自然数N整数Z有理数Q実数R複素数C 無理数R-Q)…
・集合記号「∈∉⊂⊆⊊、∩∪Φ(大文字のファイ)A−」
集合「状態」を示す物基本4パターン(∈∉⊂⊆⊊)
属する∈
属さない∉(not)
部分集合⊆
真部分集合⊊
集合「エリア(範囲)」を示す基本5パターン(∩∪UΦAA−)
積集合、共通集合∩(and)
和集合、合併集合∪(or)
全体集合U
空集合Φ
補集合A−(not)
ドモルガンの法則…
「集合」を「n(集合式)」や「|集合式|」で記述
「和集合」の式(2つの集合、3つの集合)
2つの集合の「和集合」の式
3つの集合の「和集合」の式
・「集合」の「条件式、濃度、直積集合」記述
条件式付き集合の記述…
記述例1:
記述例2:
記述例3:
「P」と「P(x)」などの「条件式付き集合」の記述方法(重要)
「集合」の「要素数」と「濃度」
「全単射」
「全射、単射」
「写像map(集合A,集合B)」(配置集合)
「無限集合」同士の全単射
「直積集合」について(直積、デカルト積)
・「論理記号」(∧&∨¬⇒→⊕⊻≠⇔⇄↔≡=)
「真理値表」の「真1」と「偽0」の表記について
「∧」「&」…「論理積and」「かつ」「および」
「∨」…「論理和or」「または」「もしくは」
「¬」「!」…「否定not」「〜でない」
「⇒」「→」…「論理包含imp」「含意imp」(条件式)「証明▶〜ならば〜である」
「≠」「⊻」「⊕」…「排他的論理和xor」「証明▶≠等しくない」
「⇔」「⇄」(↔≡=)…「同値xnor」(「iff」と書く事もある)「証明▶互いに成り立つ」
「論理記号」使用例
「P ∧ Q」論理積and
「P ∨ Q」論理和or
「¬P」否定not
「P ⇒ Q」論理包含imp
「P ⊕ Q」排他的論理和xor
「P ⇔ Q」同値xnor
・「集合」と「論理演算」の関係
「and」(PかつQである)
「or」(PまたはQである)
「not」(Pでない)
「論理包含⇒」(PならばQである)
・「命題」と「否定」 (論理演算)
「論理演算(bool演算)」「論理変数(命題変数、bool変数)」について
「論理演算(bool演算)」は「真偽」を返す
「論理変数(命題変数、bool変数)」は「真偽」を表現する
大文字と小文字の違い「Pとp」「Qとq」
「命題」「真の命題」「偽の命題」とは
「真の命題」
「偽の命題」
「命題でない」
「真の命題」「偽の命題」は「命題」と省略して書く
「否定¬」について
「命題p」の「否定」について
「p and q」「p or q」の「否定」(ドモルガンの法則)
「命題」の「否定」でよく使われる形
・「条件、条件命題」「命題関数 述語 性質」
「条件、条件命題」と「命題関数」とは(「事柄(内容)」と「変数x」)
「命題関数」とは(変数x)
「条件、条件命題」とは「命題関数」の事である
「条件命題」を「条件」と省略して書く
「条件」とは「命題関数 述語 性質」の事である
・「命題」と「条件、条件命題」と「集合」
「命題と条件命題」の考え方
「変数を持たない」時(「命題p」など)(0項述語)
「変数を1つ」持つ時(「条件p」や「条件p(x)」など)(1項述語)
「変数を2つ」持つ時(「条件p(x, y)」など)(2項述語)
「条件命題p(x)」と「集合P(x)」の区別
「真理集合」とは…(「条件P(x)」と「集合」の記述)
「命題」「条件」「集合」の表記の曖昧さについて
・「単純命題(要素命題)」と「複合命題(合成命題)」
「論理記号」と「命題」で使う「品詞(助動詞 係助詞 接続詞 否定詞)」
「単純命題(要素命題)」とは(「論理演算」を含まない「命題」)
「複合命題(合成命題)」とは(「論理演算」を含む「命題」)
・「推論の命題⇒」の概要
「推論の命題⇒」(〜ならば〜である)
「ならば」や「p ⇒ q」とは「p or !q」や「!(p&!q)」のことである(重要)
「ならば」について…(重要)
「p ⇒ q」が「真」の時、「P ⊆ Q」となる(重要)
「P ⇒ Q」が「真」の時、何故「P ⊆ Q」と言えるのかの証明
「十分条件、必要条件、必要十分条件」(十分範囲、必要範囲)
「十分条件」と「必要条件」の「覚え方」
「必要十分条件」
「十分条件、必要条件」の使用例
・「推論の命題⇒」の考察
何故「P⇒Q」は理解しづらいのか?
疑問1(「P ⇒ Q」のPが偽の時に真となるのが腑に落ちない)
疑問2(「P ⇒ Q」を「P ⊃ Q」と記述するのが腑に落ちない)
疑問を解決する為の前知識1(空集合の定理1、元ゲン)
「P ⇒ Q」と「¬(P ⇒ Q)」
「空集合Φのルール1」
「空集合Φのルール1−1」
「空集合Φのルール1−2」
「元ゲン」とは
疑問を解決する為の前知識2(空集合の定理2、べき集合)
「空集合Φのルール2」
「空集合Φのルール2」の補足
「集合」と「{}」
「べき集合(冪集合)、集合族」(「べき集合」と「部分集合⊆」の違い)
「空集合Φ」と「べき集合」の濃度
「空集合Φのルール2−1」
「空集合Φのルール2−2」
疑問1の考察(「P ⇒ Q」のPが偽の時に真となるのが腑に落ちない)
「Pが真1」「Qが真1」「P ⇒ Qが真1」の考察
「Pが真1」「Qが偽0」「P ⇒ Qが偽0」の考察
「Pが偽0」「Qが真1」「P ⇒ Qが真1」の考察
「Pが偽0」「Qが偽0」「P ⇒ Qが真1」の考察
疑問2の考察(「P ⇒ Q」を「P ⊃ Q」と記述するのが腑に落ちない)
・「推論の命題⇒」の「逆 裏 対偶」
「推論の命題⇒」の「逆 裏 対偶」
「命題の逆裏対偶」と「論理演算と集合」の関係
「①命題P ⇒ Q」と「④対偶¬Q ⇒ ¬P」の関係(!P or Q)
「②逆Q ⇒ P」と「③裏¬P ⇒ ¬Q」の関係(P or !Q)
・「推論の命題⇒」の「証明」(反例と背理法)
制作中です
C# 数学13 「集合の写像fと関数f(x)」
http://ダミー・集合の「写像f」と「関数f(x)」
「写像f」とは…
使用例:
「写像」の条件
「部分写像」「始域と終域」「定義域と値域」「全単射」
「写像f」は関数「f(x)」と同じ…
計算例1:
計算例2:
計算例補足:(この手の計算時の決まり事3つの心得)
「逆写像f-1」(fインバース)について
作成中
C# 数学14 「1次元関数と2次元関数グラフ 平方完成」
http://ダミー作成中
C# 数学15 「」()
http://ダミー作成中
C# 数学16 「極限-基本1」
「lim、収束発散、振動、不定形、片側極限」
http://1studying.blogspot.jp/2017/10/c.html・「極限lim」(リミット)
「極限lim」とは…(収束と発散)
「収束」の詳細…
「発散」の詳細…
「振動」とは…
「不定形の極限」(不定形とは…)
「不定形の極限」例(不定形4パターンと不定形でないパターン)
「不定形の極限」の際の注意
「片側極限」「左極限(左側極限)」「右極限(右側極限)」
絶対値の極限(片側極限)
C# 数学17 「常用対数、ネイピア数e-基本1、自然対数-基本1」e log ln exp
http://1studying.blogspot.jp/2017/11/c-ee-log-ln.html・底、真数、指数、対数
真数と対数とは
・「対数log」、常用対数について
関数電卓で「対数log」を計算
「常用対数」について…(log10)
関数電卓の記述で統一
・「対数log」の公式
「対数log」の公式4パターン
定義
「logの性質」となる公式
「log真数の積」から「対数logの和」への公式
「log真数の商」から「対数logの差」への公式
「log真数の累乗」から「実数と対数logの積」への公式
「底の変換公式」
「底の変換公式」計算例
常用対数表と自然体数表
・「ネイピア数e(exp)」、自然対数について
「ネイピア数e(exp)」
「ネイピア数e」の別の記述方法
「自然対数」について…(loge又はlnログナチュラル)
・常用対数と自然対数の定義
常用対数の定義
自然対数の定義
・C#で常用対数(log10)や自然対数(logeやln)を扱う
C#での対数使用例
C#と関数電卓でのlogの違い
・PCや関数電卓で「指数表記e」を扱う際の注意
「E」や「e」を「指数表記」として扱う!?
C# 数学20 「統計-基本3」
「統計的予測、確率と期待値Eと分散V、プロスペクト理論 モンティホール問題 ガチャ」
ダミー・「統計的予測」をする
「統計分析」と「統計的予測」…
「統計的予測」と「推測統計」の違い
・「離散型」の「確率分布、確率変数X、関数P」について
「離散型確率分布」「確率変数X」「確率質量関数P」
「離散型確率分布」と「二項分布」
「離散型と連続型」の「確率変数Xと確率分布」(確率質量関数Pと確率密度関数P)
・確率と期待値E[X]と分散V[X]
「確率」とは
「期待値」とは(「期待値」と「平均」の違い)
「期待値E[X]」と「分散V[X]」(離散型確率変数Xに対して)
「期待値」の計算例
計算例:(期待値Eと正規分布)
・「プロスペクト理論」と「モンティ・ホール問題」と「ガチャ」
「プロスペクト理論」
「モンティ・ホール問題」
作成中
C# 数学20 「順列Pと組合せC、重複順列と重複組合せH」
ダミー・「順列P」と「組合せC」の公式
「順列P」と「組合せC」の違い
「順列Pの公式」と「組合せCの公式」
・「重複順列」と「重複組合せH」の公式
「重複順列」(全パターン数)と「重複順列の公式」
計算例1:(重複順列)
計算例2:(重複順列)
「重複組合せH」と「重複組合せHの公式」
計算例1:(重複組合せH)
計算例2:(重複組合せH)
計算例3:(重複組合せH)
・「順列P、組合せC、重複順列、重複組合せH」まとめ
「順列P、組合せC、重複順列、重複組合せH」の違いとまとめ
「重複順列」(全パターン数)
「順列P」
「組合せC」
「重複組合せH」
「順列P」公式の変形
「順列P」と「組合せC」の相互変換公式
「二項定理」「二項分布」への準備
計算例:(組合せC補足)
C# 数学20 「二項定理、多項定理」
ダミー・「項、二項、多項、一般項」
「項」と「二項」と「多項」について
「一般項」とは
・二項定理
作成中
C# 数学99 「統計-基本4」
「正規分布-基本2、二項分布、ポアソン分布」
ダミー作成中
C# 数学99 「ネイピア数e-基本2、自然対数-基本2」
ダミー・「ネイピア数e」を求める
「ネイピア数e」の数値を計算
「極限lim」で「ネイピア数e」を求める
「総和Σ」で「ネイピア数e」を求める
・「極限lim」で「ネイピア数e」を求める(複利計算)
「複利計算」とは
計算例1(複利計算):
計算例2(複利計算):
「複利計算」から「ネイピア数e」を求める
・「極限lim」で「ネイピア数eの逆数」を求める(外れる確率)
「極限lim」で「ネイピア数eの逆数」を求める
当たるか外れるか「確率」「期待値」とは(分散Vと標準偏差σ)
作成中
C# 数学99 「極限-基本2」
「はさみうちの原理、マクローリン展開」
ダミー・「はさみうちの原理(定理)」
「はさみうちの原理」とは
計算例1(はさみうちの原理):
計算例2(はさみうちの原理):
「はさみうちの原理」と「はさみうちの定理」の違い
・「マクローリン展開」で「極限lim」を求める
「マクローリン展開」とは
計算例1:(マクローリン展開)
計算例2:(マクローリン展開)
「マクローリン展開」で「極限lim」を求める
計算例1:(マクローリン展開で極限lim)
計算例2:(マクローリン展開で極限lim)
C# 数学00 「微分」
ダミーC# 数学00 「積分」
ダミーC# 数学00「極限-応用1」
「ロピタルの定理」
ダミー・「ロピタルの定理」で「極限lim」を求める
「ロピタルの定理」とは
作成中
C# 数学00 「フーリエ変換」
ダミーC# 数学00 「線形代数-基本1」
「行列-基本1、ベクトル-基本」
ダミー・まとめ「行列その1」「ベクトル」
「行列」の計算
「ベクトル」の計算
・「行列」の書き方
行列の見方
(行,列)の見方
「複数の行列」と「添え字」
・行列って何?
説明1:「写像」で「行列」をイメージ
説明2:「メソッド」で「行列」をイメージ
・「行列の和」「行列の差」の計算方法
行列の和
行列の差
・「行列のスカラー倍」の計算方法
行列のスカラー倍(スカラー乗積)
(「λラムダ」って何?…)
・「行列の積」の計算方法
行列の積
・「行列とベクトルの積」の計算方法
行列とベクトルの積
・「ベクトル」の書き方
ベクトルの書き方(転置ベクトルとは…)
ベクトルの記述とイメージ
ベクトル記号の書き方1(「a→」ベクトル)
ベクトル記号の書き方2(「|・|」絶対値absと「||・||」ノルム)
ベクトルの計算(ノムル)
・「ベクトルとベクトルの和」の計算方法
ベクトルとベクトルの和
・「ベクトルの内積」(スカラー積)の計算方法
ベクトルの内積(スカラー積)
「ドット積(標準内積)」と「ベクトルの内積」の関係
「ベクトルの内積」(スカラー積)とは…
・「ベクトルの外積」(ベクトル積)の計算方法
ベクトルの外積(ベクトル積)
「面積(a→b→)」と「ベクトルの外積」の関係
「ベクトルの外積」(ベクトル積)とは…
その他の外積(外積代数)
ベクトルの内積、ベクトルの外積の記述
・他の行列